
- 技術ストーリー
![]()
![]()
熊本大学工学部 電気情報工学科・教授 川路 茂保
(注意)本記事は、金剛株式会社が1990年2月20日に発行した機関誌「PASSION VOL.6」の内容を、当時の記録として公開するものです。記事内の情報は発行当時のものであり、現在の状況とは異なる場合があります。また、当時の社会情勢や倫理観を反映した表現が含まれている可能性があり、現代の基準に照らし合わせると一部不適切と感じられる箇所もあるかもしれませんが、資料的価値を考慮し、原文のまま掲載しています。掲載されている商品やサービスは、既に販売・提供を終了している場合があります。
本記事は、著作権法上の引用の範囲内で掲載しています。当時の記録として、皆様に楽しんでいただけましたら幸いです。
熊本大学工学部 電気情報工学科・教授 川路 茂保
最近の新聞に科学技術に関する記事が以前に較べて非常に多くなっている。この理由はいろいろと挙げられると思うが、その筋の専門家ではないので分析は差し控えたい。ただ、注目したいのはありとあらゆる場面で“制御”、“コントロール” という言葉が直接的に或は間接的に登場していることである。制御工学を専門としている者にとっては、制御技術の意義や重要性が認識されてきたわけで、非常に喜ばしいことである。しかし、その意義を通り越して言葉が先行し、思わぬ誤解を招いている場面もある。
伝達関数という概念に基づく古典制御理論は、戦後のオートメーションを経て完成され、現在でも多くの実際の現場で用いられているが、多変数系が扱えないとか評価を導入しにくいなどの壁にぶつかった。 kalman という人が状態空間法という新しい制御理論の枠組みを発表したのが今からちょうど30年前である。この間に、マイクロプロセッサの急速な進歩や設計用CADの整備等を背景に理論と応用の面で大きな発展があった。最近は宇宙構造物のマクロな制御から光ディスクのミクロな制御までその応用は多岐に渡っており、制御理論が実用化という試練を乗り越えて成熟した制御技術の一つになりつつあると言えよう。
しかし、その反面、古典制御理論に較べ抽象化の度合が高い現代制御理論を現実の問題に応用する際に、その欠陥も浮き彫りにされつつあり、H 無限大制御やロバスト制御などより高度な理論へと展開され、いまや「アドバンスト制御」の世代となっている。反面、応用面では逆にファジィやニューラル・ネットワークなどの平易な考えに基づく制御へ関心が向かっている傾向にある。この意味で、制御は現在ひとつの転機にさしかかって いるのかもしれない。
この様な趨勢の中で、将来の核となり得る制御技術のキーは何かを捉える必要があることは言うまでもない。しかし、いち早く捉えたいとの焦りで本質的なものを見失わないことが肝要である。その意味で、本文では制御のあけぼのをひもとき、制御の基本的概念をいま一度考えてみたい。
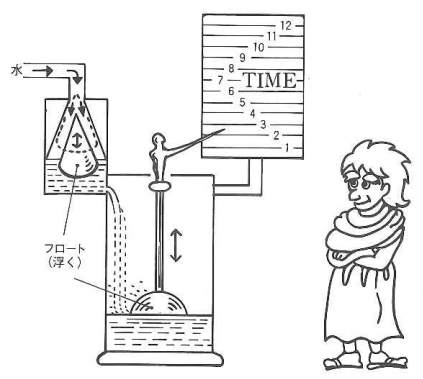
制御の始まりとしてよく知られているのは、J. Watt の蒸気機関における調速器であるが、それ以前に何もなかったかというとそうでなく、ギリ シャ時代の水時計にみることができる。水時計は字のごとく時間を計るためのものなので、タンクから一定の水が出てくれないと困る。このためにフロートがあって、それが下がると水が入ってまた上がるということで、水位が一定になる仕組みになっている。現在の水洗トイレに使われている原理は実は紀元前からあったことになる。これが自動制御のもっともプリミティブな形であろう。しかし、この時代にはこの様な機構が制御という概念のもとに造られた訳ではなさそうで、歴史的には J. Wattまで待つことになる。

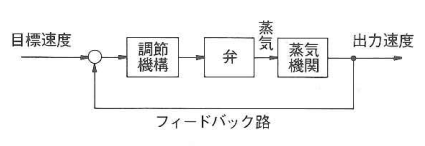
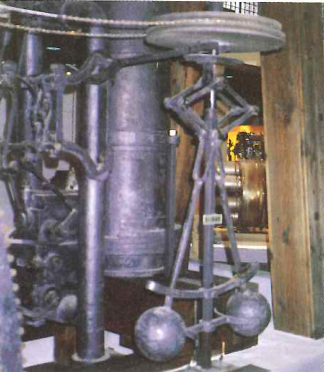
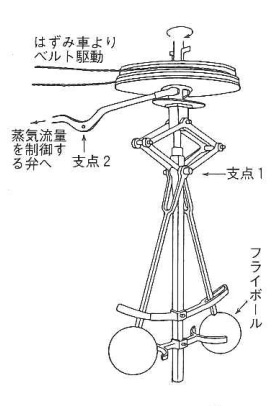
当時、炭鉱から水を揚げる機械として蒸気機関が普及していたが、圧力計がないため圧力がどの位かかると危ないので火を小さくせよとかいう手だてがなく、よく爆発事故を起こしていた。その蒸気機関を後の産業革命に使えるようにした一番の功労者がJ. Wattである。どの様にして使えるようにしたかというと、それまでは、一定流量の蒸気が加わっているとき、負荷が小さくなるとだんだん高速で回る様になるので、バルブを止めて気量を下げる。すると今度は遅くなる。またバルブを開けると高速で回るというふうに蒸気機関の回転数が脈動して使いものにならなかった。その蒸気機関が一定に回るような制御装置を作ったわけである。図1にその概念図が示されているが、最も重要なことは、蒸気機関を一定に回転させるために回転速度を測定しこれにより蒸気量を調整するフライホイールボール型のガバナー(調 速器)の要素を付けたことである。 図2に示すように、調速器を取り付けた蒸気機関は、制御しようとする量と目標値を比較してその差が小さくなるように操作が行われており、信号がフィードバックされている。19世紀の中頃には75,000台以上の蒸気機関がイギリスで使用されているので、蒸気機関がうまく動くか動かないかは大きな問題となる。しかし、当時の人にとっては理論的に考えてうまく動くはずなのにうまく動かないことが多かった。なかには発振して壊れそうになったりする。どういう風に調速器を設計したらいいのかというのが大きな産業界の問題となり、多くの理論研究者の興味を引いた。
その後、この問題は Maxwell が調速器を含め た蒸気機関の微分方程式の安定性の問題に帰着されることを指摘した。これが制御理論の始まりと言われている。20世紀にはいると、自動制御の応用はオートパイロットからプロセス制御に至る各方面に拡がった。第二次世界大戦をへて、いわゆる古典制御理論が完成し、その後1960年以降は現代制御理論の時代となり今日に至っている。何に注目して制御理論が発展してきたかを分析するのは将来の技術開発に取り組む際に非常に重要であるが、紙面の都合で割愛する。
J. Watt の調速器の例のように、
「ある目的に適合するように対象となっている ものに所要の操作を加えること」
を制御という。したがって、制御系の設計法の本質は、次の方程式
望ましい制御系(制御目的) = コントローラ X 制御対象
において、“制御対象”と“制御目的”を与えて、 “コントローラ”を解くという構造になっている。
制御対象と制御目的は客先から与えられる。制御目的にしたがって、まず制御工学的条件を満たす望ましい制御系を構成し、上の方程式を解くことになる。✕印は制御対象とコントローラを接続することを演算の形で表現したもので、具体的にどんな演算になるかは採用する制御方式に変わる。したがって、制御理論は基礎となる原理をそれ自身が含む閉じた純粋工学理論であるので、コンセプトが非常に重要となり、体系としてのまとまりに気をつけなければならない。この点は通信工学や計算機工学、ソフトウェア工学なども同類である、半導体物性工学や音響工学などのように物理学や化学などの自然科学に基礎をもつものとは異質である。このため制御理論はどうしても抽象的普遍的となるが、他方それを使う現場はきわめて具体的個別的なところである。この両者を結ぶ糸が対象に関する知識を構造化して目的にあったモデルを作るモデリング技術である。技術者の力量は対象の個別性を適切なモデルを作ることによりいかに善遍性へと持込むことができるかで問われることになる。このとき気を付けるべきは、制御目的に適合するように制御対象を表現すべきであることである。応々にして、この点が忘れられることが多い。いまブームになっているファジイ制御などはその例で、モデルに基づく制御が時代遅れであるかのように主張しているが、制御系設計の立場から考えると合点がいかない。ファジイ制御は、如何なる制御目的に対して、如何なるモデリング手法を用い、設計方程式を如何に解いたかが現在のところ全く不明である。どうもツールに注目し過ぎて制御の基本を忘れているのではと思われる。制御の歴史からみると、現在のファジィ技術はまさにJ. Watt により蒸気機関の調速器が発明された時点に相当し、これから解析法や設計法がいかに確立されるかによって制御技術の一つとして生き残れるかが決まると思われる。
転機にさしかかりつつある制御技術の未来を予測する代わりに、逆に制御の生まれた頃と制御設計法の基本について述べてみた。ちなみに、熊本城の一角に立派な熊本市立博物館があるが、入って左側に調速器のレプリカがある。たまには、足を運んで制御技術のルーツをじいっとみつめると何かアイデアが浮かぶかもしれ ない。
参考文献 1)古田、川路他: メカニカルシステム制御、 オーム社、(1984)
2)木村:制御技術と制御理論、システム/制御 /情報、33-6、257/263(1989)
(1990年2月20日刊行)

